
 ついにWATLABブログから書籍「いきなりプログラミングPython」が発売しました!
ついにWATLABブログから書籍「いきなりプログラミングPython」が発売しました!
先日の記事で回転機のアンバランス振動シミュレーションをPythonで行いました。振れ回り振動と参考書の対応がとれたので、次はより詳細な分析を行うために回転パルス(基準信号)をシミュレーションで設定してみます。ここではPythonのodeintで基準パルスを設定しながらアンバランス振動のシミュレーションを行う方法を紹介します。
こんにちは。wat(@watlablog)です。回転機のシミュレーションを進めていくために、この記事では回転パルスをシミュレーションで表現する方法を紹介します!
回転パルスをシミュレーションで再現する理由
回転機シミュレーションのおさらい
以下の記事では回転機のシミュレーションをしてみました。この記事の中ではアンバランス振動の運動方程式を導出し、Pythonのodeintを使って振れ回り振動が出ることを確認しています。
・回転機のアンバランス振動をシミュレートするPythonコード
このページで扱うPythonコードは上記記事の内容を前提としています。まだ読んでいない方は是非ご覧になってください。
バランス修正には回転パルスの計測が重要
回転機を扱う実際の現場では、アンバランス振動を計測してバランスの悪さを修正する工程が存在します。タイヤ、モータのアーマチュア、換気扇のファン…と世の中には多数のバランス調整を必要とする機械があります。
もしかしてあなたの家のエアコン室外機用ファンも、バランス調整をした後の形跡(ブレードがもっこりしている、クリップがついている…等)があるのでは?
実際はアンバランスを加速度センサーやひずみゲージ、力センサーで振動を計測します。
しかし、これらのセンサーを単体で使っている場合、振動の大小はわかってもどこに修正錘を取り付ければ良いかがわかりません。
回転パルスを振動と同期計測することで、回転機の機械角と振動の位相差\(\phi\)を知ることが可能です。
下図は回転機に反射テープを貼り、レーザーで回転パルス、振動センサーで振動を計測している例です。通常回転パルスは一回転に一回の電圧降下(または電圧上昇)を発生させることで位置検出を行います。
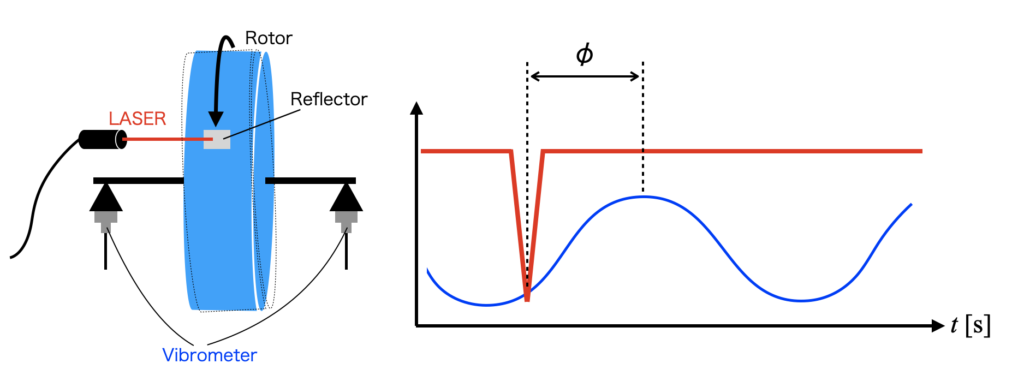
振動のピークとアンバランスのある場所を知ることでバランスの修正ができるため、回転位置検出が精密な回転を実現させるキーポイントとなります。
共振が発生すると位相がずれる
回転機の位置検出原理は非常に理解しやすいですが、世の中の回転機が弾性体であることがやや検出を難しくします。
参考文献\(^{[1]}\)によると、アンバランス偏心と振動の位相関係は共振に左右されるとあります。一般的な1自由度ばねマス系でも共振で位相が変わるのはよく知られていますが、位置検出が重要な回転機ではその特徴が計測の最大の問題点となる場合があるでしょう。
そのため共振問題に頻繁にさらされる回転機のシミュレーションをできるようにすることは非常に重要です。
この記事ではまず1つだけ共振を持つ回転機のシミュレーションをしてみます。複数の共振を持つ回転機はおそらく以下の記事にあるような多自由度振動系のシミュレーション手法が使えると思うので、このページでは基礎的なことのみ扱います。
・Pythonで多自由度振動系の過渡応答計算をする時はSciPyを使おう
SciPyのodeintで回転パルスを追加するPythonコード
動作環境
この記事のコードは以下のPython環境で動作確認をしています。後半に動画を作成するコードを紹介している都合でpillowも使っています。
■Python環境
| Python | Python 3.9.6 |
|---|---|
| PyCharm (IDE) | PyCharm CE 2020.1 |
| Numpy | 1.21.1 |
| Scipy | 1.4.1 |
| matplotlib | 3.4.3 |
| pillow | 7.1.2 |
全コード
以下に「回転機のアンバランス振動をシミュレートするPythonコード」で紹介したシミュレーションへ回転パルス生成処理を追加したコードを示します。
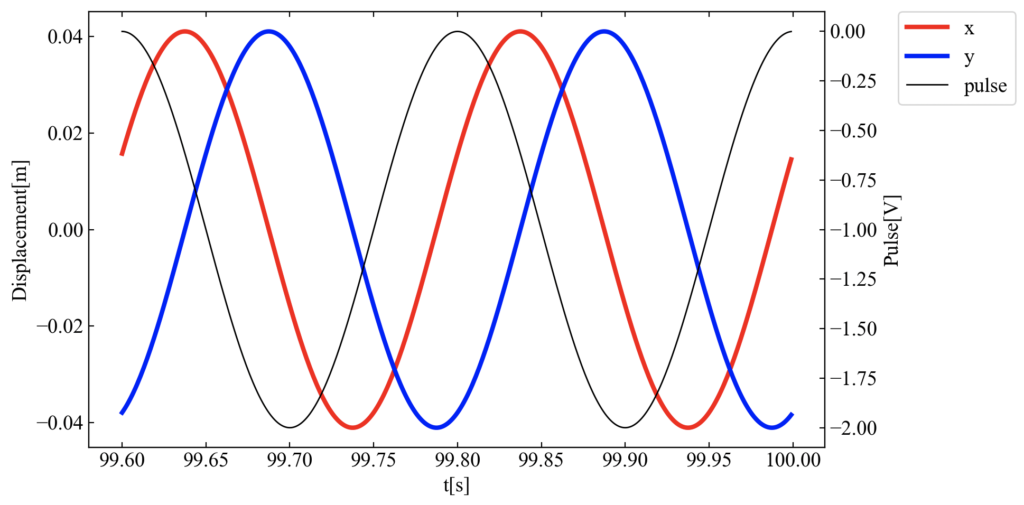
回転パルスは\(\cos \omega t\)を基準として関数fの中で計算しています。odeintに渡す積分するための関数なので式(1)の微分形式にしています。
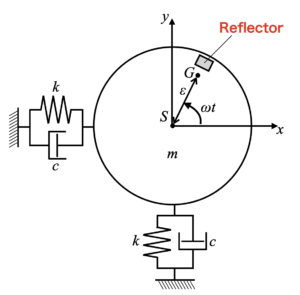
今回のシミュレーションは偏心位置に反射テープを貼っていることを想定します。力学モデル上で図示すると以下になります。
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 |
import numpy as np from matplotlib import pyplot as plt from scipy.integrate import odeint def f(var, t, m, k, c, epsilon, omega): ''' 運動方程式:回転機のアンバランス振動 ''' # xとy、変位と速度に分ける x = var[0] y = var[1] x_dot = var[2] y_dot = var[3] # 回転パルスの変数を抽出 pulse = var[4] pulse_dot = var[5] # 運動方程式 x_ddot = epsilon * omega ** 2 * np.cos(omega * t) - (c / m) * x_dot - (k / m) * x y_ddot = epsilon * omega ** 2 * np.sin(omega * t) - (c / m) * y_dot - (k / m) * y # 回転パルスの2階微分 pulse_ddot = - omega ** 2 * np.cos(omega * t) # 結果 output = [x_dot, y_dot, x_ddot, y_ddot, pulse_dot, pulse_ddot] return output def plot(t, x, y, pulse, N): ''' Plot ''' # フォントの種類とサイズを設定する。 plt.rcParams['font.size'] = 14 plt.rcParams['font.family'] = 'Times New Roman' # 目盛を内側にする。 plt.rcParams['xtick.direction'] = 'in' plt.rcParams['ytick.direction'] = 'in' # グラフの上下左右に目盛線を付ける。 fig = plt.figure(figsize=(10, 5)) ax1 = fig.add_subplot(111) ax1.yaxis.set_ticks_position('both') ax1.xaxis.set_ticks_position('both') ax2 = ax1.twinx() # 軸のラベルを設定する。 ax1.set_xlabel('t[s]') ax1.set_ylabel('Displacement[m]') ax2.set_xlabel('t[s]') ax2.set_ylabel('Pulse[V]') # 回転数から周期を計算(データ抽出用) freq = N / 60 cycle = 1 / freq dt = t[1] sample_cycle = int(cycle / dt) size = len(t) # データプロットの準備とともに、ラベルと線の太さ、凡例の設置を行う。 ax1.plot(t[size - 2 * sample_cycle::], x[size - 2 * sample_cycle::], label='x', lw=3, color='red') ax1.plot(t[size - 2 * sample_cycle::], y[size - 2 * sample_cycle::], label='y', lw=3, color='blue') ax2.plot(t[size - 2 * sample_cycle::], pulse[size - 2 * sample_cycle::], label='pulse', lw=1, color='black') # 凡例をまとめて出力する handler1, label1 = ax1.get_legend_handles_labels() handler2, label2 = ax2.get_legend_handles_labels() ax1.legend(handler1 + handler2, label1 + label2, bbox_to_anchor=(1.1, 1), loc='upper left', borderaxespad=0.) # レイアウト設定 fig.tight_layout() # グラフを表示する。 plt.show() plt.close() if __name__ == '__main__': ''' Main ''' # モデルを定義 # 回転機の質量 m = 0.1 # 軸受条件:剛性と減衰 k = 100.0 c = 0.1 # 重心ずれ(G点からepsilonを設定) xg = 0.001 yg = 0.001 epsilon = np.sqrt(xg ** 2 + yg ** 2) # 回転数:N[rpm], omega[rad/s] N = 100 omega = 2 * np.pi * (N / 60) # 解析時間 dt = 1e-3 t_max = 100.0 t = np.arange(0.0, t_max, dt) # 初期条件 x0 = 0.0 y0 = 0.0 x_dot0 = 0.0 y_dot0 = 0.0 pulse0 = 0.0 pulse_dot0 = 0.0 var = [x0, y0, x_dot0, y_dot0, pulse0, pulse_dot0] # 微分方程式の近似解法(過渡応答) var = odeint(f, var, t, args=(m, k, c, epsilon, omega)) # 結果を分離(0:x変位, 1:y変位, 2:x速度, 3:y速度) x = var.T[0] y = var.T[1] pulse = var.T[4] # プロット plot(t, x, y, pulse, N) |
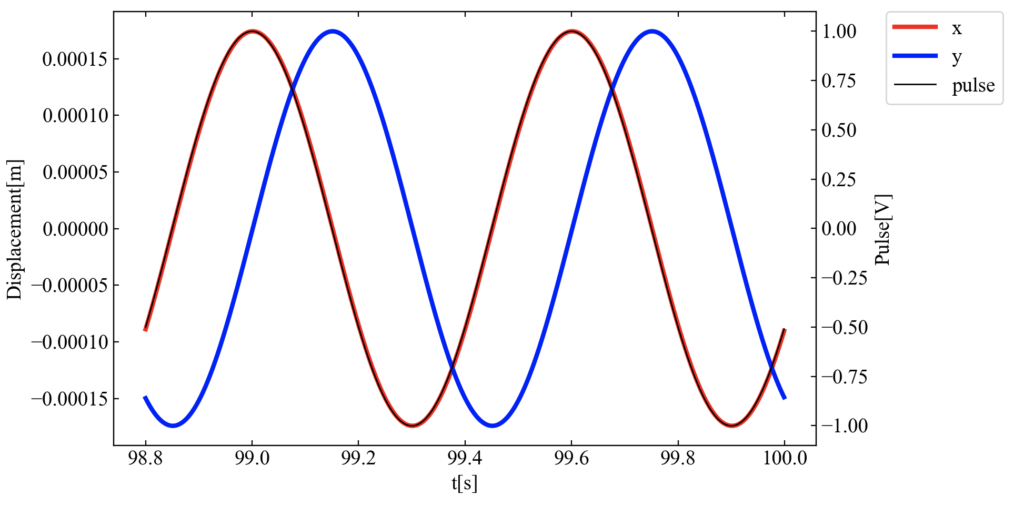
こちらが結果です。回転パルスと回転機のアンバランス振動(x変位)は同相であることが確認されました。
ちなみにmatplotlibの2軸描画や、2軸描画をした場合の凡例設定は以下の外部サイトを参考にしています。
・Matplotlib-2軸グラフの書き方
共振影響を確認する
先ほどは回転数100[rpm]程度の計算結果でしたが、今度は300[rpm]と回転数を上げてみましょう。事前に回転数違いの計算結果を確認しておき、この系は300rpm程度で共振するということはわかっているものとします。
下図が結果です。回転パルスと振動の位相差が確認されました。参考書\(^{[1]}\)の通りです。
トリガー検出を実装して位相ずれをアニメーションにするPythonコード
トリガー検出
より実験と同じ状況をシミュレーションで再現するため、解析で得られた回転パルスの信号をトリガー検出してみましょう。トリガー検出とは、信号の立ち上がりや立ち下がりをプログラム的に検出することで、意図したタイミングでデータを抽出するために使います。
過去に以下の記事でトリガー検出をPythonで実装してみましたので、それをちょっといじってみます。
・Pythonで時間波形のトリガ検出アルゴリズムを作る!
全コード
「if np.sign(data[i - 1]) != np.sign(data[i]):」でトリガーを検出していますが、「j = data[i - 1] > data[i]」を使って立ち上がりの時だけに着目しています。このコードはimgフォルダの中に「N_list = np.arange(10, 600, 10)」で作成した回転数条件分の計算結果を保存し、gif画像result.gifを生成します。
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 |
import numpy as np from matplotlib import pyplot as plt from scipy.integrate import odeint from PIL import Image import os import glob def f(var, t, m, k, c, epsilon, omega): ''' 運動方程式:回転機のアンバランス振動 ''' # xとy、変位と速度に分ける x = var[0] y = var[1] x_dot = var[2] y_dot = var[3] # 回転パルスの変数を抽出 pulse = var[4] pulse_dot = var[5] # 運動方程式 x_ddot = epsilon * omega ** 2 * np.cos(omega * t) - (c / m) * x_dot - (k / m) * x y_ddot = epsilon * omega ** 2 * np.sin(omega * t) - (c / m) * y_dot - (k / m) * y # 回転パルスの2階微分 pulse_ddot = - omega ** 2 * np.cos(omega * t) # 結果 output = [x_dot, y_dot, x_ddot, y_ddot, pulse_dot, pulse_ddot] return output def trigger(data, Tlevel): ''' トリガーをかける ''' data = data - Tlevel # 波形全体をトリガレベルでオフセット # 位置情報 i と判定値 jを初期化 i = 0 j = True # ゼロクロス点探査Whileループ # ループ停止条件=トリガを検出した場合と検出されなかった場合のどちらか while j == True: # 最初のループはiを増分させるだけ if i == 0: i = i + 1 # 波形を全て探査した場合はjを強制的に判定値jをFalseにしてiに-1(未検出の意味)を代入 elif i + 1 == len(data): j = False i = -1 # 前の値(i-1)と今の値(i)で符号を比較し判定値jに渡す。iを増分させる。 else: if np.sign(data[i - 1]) != np.sign(data[i]): j = data[i - 1] > data[i] i = i + 1 return i def plot(t, x, y, pulse, N, dir_name, index): ''' Plot ''' # フォントの種類とサイズを設定する。 plt.rcParams['font.size'] = 14 plt.rcParams['font.family'] = 'Times New Roman' # 目盛を内側にする。 plt.rcParams['xtick.direction'] = 'in' plt.rcParams['ytick.direction'] = 'in' # グラフの上下左右に目盛線を付ける。 fig = plt.figure(figsize=(10, 5)) ax1 = fig.add_subplot(111) ax1.yaxis.set_ticks_position('both') ax1.xaxis.set_ticks_position('both') ax2 = ax1.twinx() # 軸のラベルを設定する。 ax1.set_xlabel('t[s]') ax1.set_ylabel('Displacement[m]') ax2.set_xlabel('t[s]') ax2.set_ylabel('Pulse[V]') # スケール ax1.set_ylim(-0.04, 0.04) # 回転数から周期を計算(データ抽出用) freq = N / 60 cycle = 1 / freq dt = t[1] sample_cycle = int(cycle / dt) size = len(t) # 時間波形調節:最終点から4周期分を抽出 pulse = pulse[size - 4 * sample_cycle::] x = x[size - 4 * sample_cycle::] y = y[size - 4 * sample_cycle::] # 時間波形調節:パルス波形でトリガーをかけ、トリガー点から2周期分を抽出 trigger_i = trigger(pulse, 0.5) pulse = pulse[trigger_i:trigger_i + 2 * sample_cycle:] x = x[trigger_i:trigger_i + 2 * sample_cycle:] y = y[trigger_i:trigger_i + 2 * sample_cycle:] t_axis = np.arange(0, len(x) * t[1], t[1]) # データプロットの準備とともに、ラベルと線の太さ、凡例の設置を行う。 ax1.plot(t_axis, x, label='x', lw=3, color='red') ax1.plot(t_axis, y, label='y', lw=3, color='blue') ax2.plot(t_axis, pulse, label='pulse', lw=1, color='black') ax2.text(0, 1.2, 'N=' + str(np.round(N, 1)) + '[rpm]') # 凡例をまとめて出力する handler1, label1 = ax1.get_legend_handles_labels() handler2, label2 = ax2.get_legend_handles_labels() ax1.legend(handler1 + handler2, label1 + label2, bbox_to_anchor=(1.1, 1), loc='upper left', borderaxespad=0.) # レイアウト設定 fig.tight_layout() # 画像を保存する。 # dirフォルダが無い時に新規作成 if os.path.exists(dir_name): pass else: os.mkdir(dir_name) # 画像保存パスを準備 path = os.path.join(*[dir_name, str("{:05}".format(index)) + '.png']) # 画像を保存する plt.savefig(path) # グラフを表示する。 #plt.show() plt.close() def create_gif(in_dir, out_filename): ''' imgフォルダの複数画像からGIF画像を作る ''' # ファイルパスをソートしてリストする path_list = sorted(glob.glob(os.path.join(*[in_dir, '*']))) # ファイルのフルパスからファイル名と拡張子を抽出 imgs = [] for i in range(len(path_list)): img = Image.open(path_list[i]) imgs.append(img) # appendした画像配列をGIFにする。durationで持続時間、loopでループ数を指定可能。 imgs[0].save(out_filename, save_all=True, append_images=imgs[1:], optimize=False, duration=200, loop=0) return if __name__ == '__main__': ''' Main ''' # モデルを定義 # 回転機の質量 m = 0.1 # 軸受条件:剛性と減衰 k = 100.0 c = 0.1 # 重心ずれ(G点からepsilonを設定) xg = 0.001 yg = 0.001 epsilon = np.sqrt(xg ** 2 + yg ** 2) # 回転数:N[rpm], omega[rad/s] #N = 300 N_list = np.arange(10, 600, 10) # 解析時間 dt = 1e-3 t_max = 100.0 t = np.arange(0.0, t_max, dt) for i in range(len(N_list)): # 初期条件 x0 = 0.0 y0 = 0.0 x_dot0 = 0.0 y_dot0 = 0.0 pulse0 = 0.0 pulse_dot0 = 0.0 var = [x0, y0, x_dot0, y_dot0, pulse0, pulse_dot0] # 角速度 N = N_list[i] omega = 2 * np.pi * (N / 60) print(i, N) # 微分方程式の近似解法(過渡応答) var = odeint(f, var, t, args=(m, k, c, epsilon, omega)) # 結果を分離(0:x変位, 1:y変位, 2:x速度, 3:y速度) x = var.T[0] y = var.T[1] pulse = var.T[4] # プロット dir_name = 'img' plot(t, x, y, pulse, N, dir_name, i) # GIF動画を作成する create_gif(dir_name, 'result.gif') |
こちらが結果の動画例です。最初は変位振幅が小さく、回転パルスと変位振動の位相は同相です。しかし回転数を上げていくと徐々に変位振幅が増大し位相が90度ずれ、共振を過ぎると位相が180度になっている結果を確認できました。この一連の流れは参考書\(^{[1]}\)通りであり、シミュレーションは正常に行われたと考えられます。
まとめ
この記事はここまでです。前回のアンバランス振動シミュレーションに回転パルスとして余弦波を追加してみました。回転パルスは厳密に模擬しようとすると級数展開したりして矩形波をつくるのが良いのかも知れませんが、実際は余弦波で十分です。
回転パルスをつくるということはその後の信号処理でトリガー検出をすることが一般的です。今回は過去記事を参考にしながらトリガー検出部分も実装してみました。
まだまだ簡単なことしかしていませんが、参考書「回転機の振動」に載っていることがシミュレーションで確認されていくのは面白いと思います。
参考文献
[1]:松下修己, 田中正人, 神吉博, 小林正生, 回転機械の振動 実用的振動解析の基本, コロナ社, 2011, pp27
これで実験のような位置検出シミュレーションもできそうですね!
Twitterでも関連情報をつぶやいているので、wat(@watlablog)のフォローお待ちしています!